
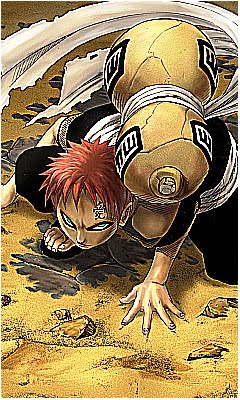
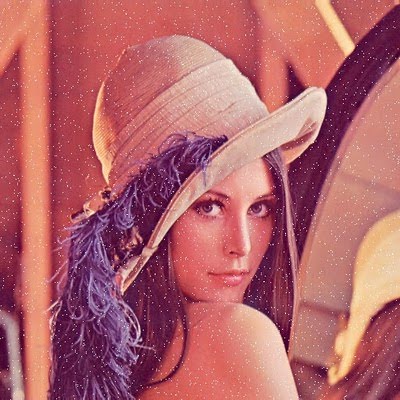
平滑線性空間濾波器的輸出(回應)是包含在濾波掩模鄰域內圖元的簡單平均值。因此,這些濾波器也稱為均值濾波器。平滑濾波器的概念非常直觀。它用濾波掩模確定的鄰域內圖元的平均灰度值去代替圖像每個圖元點的值,這種處理減小了圖像灰度的“尖銳”變化。由於典型的隨機雜訊由灰度級的尖銳變化組成,因此,常見的平滑處理應用就是減噪。然而,由於圖像邊緣也是由圖像灰度尖銳變化帶來的特性,所以均值濾波處理還是存在著不希望的邊緣模糊的負面效應。
bPtrResultImage[j*3] =
(byte)((bPtrOriginalImage0[j*3-1*3]+bPtrOriginalImage0[j*3]
+bPtrOriginalImage0[j*3+1*3]
+ bPtrOriginalImage1[j*3-1]+bPtrOriginalImage1[j*3]
+bPtrOriginalImage1[j*3+1*3]
+ bPtrOriginalImage2[j*3-1*3]+bPtrOriginalImage2[j*3]
+bPtrOriginalImage2[j*3+1*3])/9 + 0.5);
bPtrResultImage[j*3+1] =
(byte)((bPtrOriginalImage0[(j*3+1)-1*3]+bPtrOriginalImage0[j*3+1]
+bPtrOriginalImage0[(j*3+1)+1*3]
+ bPtrOriginalImage1[(j*3+1)-1*3]+bPtrOriginalImage1[j*3+1]
+bPtrOriginalImage1[(j*3+1)+1*3]
+ bPtrOriginalImage2[(j*3+1)-1*3]+bPtrOriginalImage2[j*3+1]
+bPtrOriginalImage2[(j*3+1)+1*3])/9+0.5);
bPtrResultImage[j*3+2] =
(byte)((bPtrOriginalImage0[(j*3+2)-1*3]+bPtrOriginalImage0[j*3+1]
+bPtrOriginalImage0[(j*3+1)+1*3]
+ bPtrOriginalImage1[(j*3+2)-1*3]+bPtrOriginalImage1[j*3+2]
+bPtrOriginalImage1[(j*3+2)+1*3]
+ bPtrOriginalImage2[(j*3+2)-1*3]+bPtrOriginalImage2[j*3+2]
+bPtrOriginalImage2[(j*3+2)+1*3])/9 + 0.5);

圖1 圖2
二種掩模更為重要一些。這個掩模也叫做加權平均,使用這一術語是指用不同的係數乘以圖片,這樣,從權值上看,一些圖片比另一些更為重要。對於圖2所示的3×3掩模,處於掩模中心位置的圖片比其他任何圖元的權值都要大,因此,在均值計算中給定的這一圖片顯得更為重要。而距離掩模中心較遠的其他圖片就顯得不太重要。由於對角項離中心比正交方向相鄰的圖更遠,所以。它的重要性要比與中心直接相鄰的四個圖片低。把中心點加強為最高,而隨著距中心點距離的增加減小系數值,是為了減小平滑處理中的模糊。我們也可以採取其他權重達到相同的目的。然而,圖2掩模中的所有係數的和應該為16,這很便於電腦的實現,因為它是2的整數次冪。在實踐中,由於這些掩模在一幅圖像中所占的區域很小,通常很難看出使用圖1的各種掩模或用其他類似手段平滑處理後的圖像之間的區別。
2.銳利化


{kind=link}
{kind=link}
請不要直接從網路上 copy 到報告中, 這是不被允許的行為。
回覆刪除